Calag Archive
Calag Archive
Robotic strawberry harvest is promising but will need improved technology and higher wages to be economically viable
Publication Information
California Agriculture 75(2):57-63. https://doi.org/10.3733/ca.2021a0009
Published online April 01, 2021
PDF | Citation | Permissions
NALT Keywords
Abstract
While the prospect of robotic harvest in strawberry production has received much attention within the strawberry industry and the popular press, there is little available information on the economic feasibility of this technology. It is not clear how close the industry is to being able to profitably adopt robotic harvest systems; also unclear is the relative importance of wage rates, robotic harvest efficiencies and machinery field speeds on the adoption threshold. This study aims to clarify these issues by estimating the net income to strawberry production under robotic harvest scenarios, and comparing the values to standard enterprise budgets for strawberry production in California under different wage rates for harvest labor. Results confirm that robotic harvest remains economically unviable under current wage rates and the field speeds and harvest efficiencies achieved by leading robotic harvest development teams. However, results indicate that with expected increases in wage rates in the coming years, and with modest improvements in the technical parameters, use of robotic systems will likely become profitable in some form.
Full text
Recent developments in California state agricultural labor policy, along with the aging agricultural workforce and declines in new-immigrant arrivals, have increased the urgency with which agricultural producers are seeking new labor-saving technologies (Martin 2017, 2018). Even prior to state legislation that increased the minimum wage and reduced the thresholds for overtime pay, real farm wages were rising and the number of farmworkers in the state were falling. From 2003 to 2017, the number of farmworkers employed in California fell by 32% (Bampasidou and Salassi 2019). The potential impact of automated harvest technology designed for strawberry production is particularly high given the labor intensity of the crop, the demanding nature of the work and the high cost associated with manual strawberry harvest.
The strawberry industry has responded to these developments with several separate but related efforts designed to reduce the industry's labor needs. Adoption of harvest aide equipment, which reduces the amount of time that workers spend bringing fruit to the field edge, has increased the speed of manual harvest. There have also been recent pilot programs to develop tabletop production systems, which could expand the labor pool from which growers draw, and potentially increase the speed at which workers can harvest fruit (Karst 2018). Though not a technological fix, some production has shifted to Mexico, where labor challenges are less severe. As shown in figure 1, there has been increased planted acreage in Mexico as acreage has contracted in California (SIAP 2019; USDA-NASS 2019).
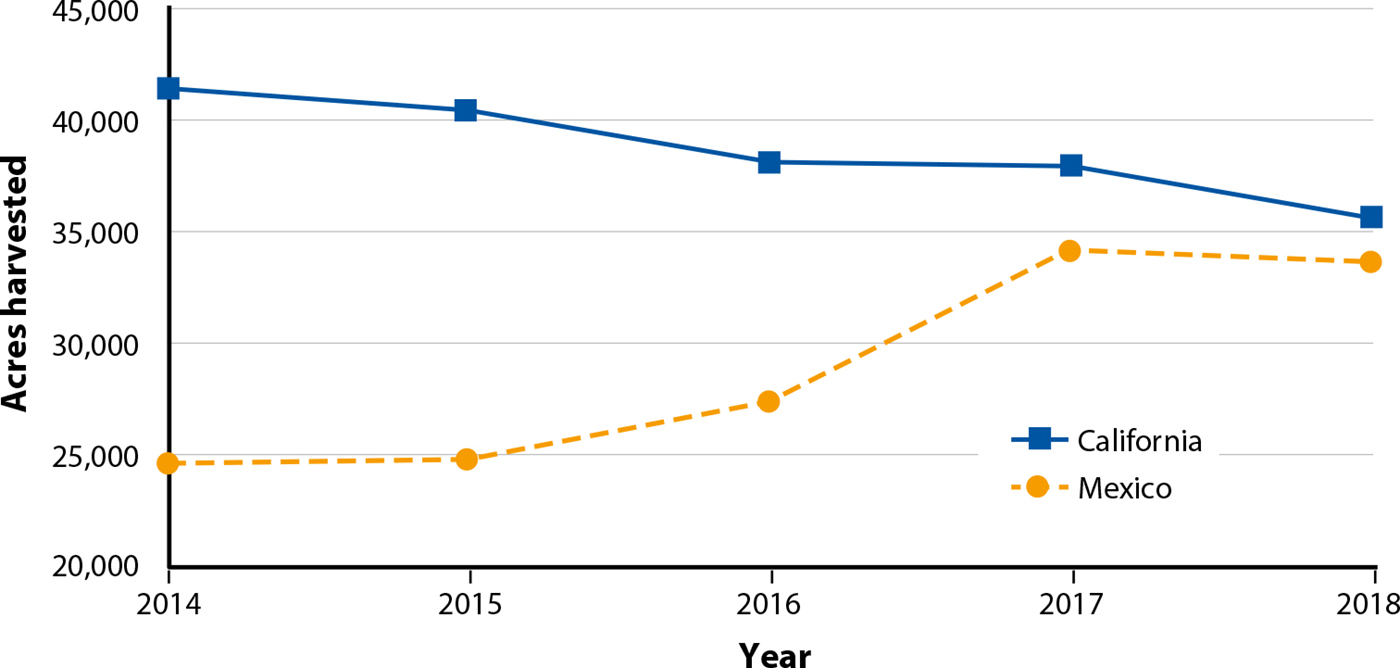
FIG. 1. Harvested strawberry acreage in California and Mexico from 2014 to 2018.Sources: USDA-NASS and SIAP databases.
These initiatives may have decreased the strawberry industry's labor needs on a per unit basis, but the prospect of fully robotic harvest technology remains the potentially transformative development that attracts much attention inside and outside the industry. Individual strawberry growers and shippers have invested heavily in robotics companies in recent years and many widely distributed popular press outlets have published articles on the development and potential impacts of robotic strawberry harvest (e.g., Mohan 2017; Paquette 2019; Seabrook 2019).

Robotic picking arms on a Harvest Croo Robotics automatic harvester. The speed and accuracy with which robotic harvesters can pick ripe strawberries is critical to their economic feasibility.
Despite this attention and excitement, there has been no publicly available economic analysis of the robotic harvesters currently being developed for in-field strawberry production. It is not clear how profitable robotic systems would be in their current form or how different wages or technical parameters impact the relative profitability of manual and robotic harvest systems. This article aims to fill that gap by developing economic models of strawberry production in California assuming harvest efficiencies and operational strategies of the industry's leading robotic developers.
Any economic analysis of novel and developing technologies faces difficulty in forecasting operating costs and field efficiencies with perfect accuracy. The case of robotic harvest in strawberry production is particularly challenging, as there is no data on the use of these robotic harvest systems in commercial strawberry operations. This study makes assumptions on harvest efficiencies and operating costs, informed by individual interviews with robotic industry leaders, but also presents ranging analysis so that the reader can better understand for themselves where the industry may lie relative to the “robotic-harvest tipping point” at which adoption of these systems will become widespread.
Methods and assumptions
This analysis uses the enterprise budgets developed for conventional strawberry production in Monterey and Santa Cruz counties (Bolda et al. 2016) as a baseline manual-harvest scenario, and then builds on this framework with a range of piece rate harvest costs, robotic harvest efficiencies and robotic harvest speeds. This method is designed to show the expected profitability of the current state of the art in automated harvest, and the degree to which different values of these parameters impact economic feasibility of robotic harvest systems. The primary metric by which economic feasibility is measured is pre-tax net income per acre, after all harvest costs and robotic harvest machinery costs are considered. Expenses that are unrelated to harvest, or that would not be impacted by the adoption of a robotic harvest system, are included in net income calculations, but assumed unchanged from those outlined by Bolda et al. (2016). While the details of this enterprise budget will certainly differ from the experience of individual strawberry growers on the Central Coast of California, this analysis illustrates the impact of the potential adoption of robotic harvest, relative to the baseline manual harvest scenario.
Strawberry production systems and supply chains are complex, and there are several simplifying assumptions that must be made. In particular, this analysis assumes that there are no changes to strawberry varieties, row spacing or other production considerations aside from the harvest method. It is certainly possible that further research will identify cultivars that are better suited for robotic harvest than those popular today, and this would improve the profitability outcomes of the robotic harvest scenario relative to those presented here. While robotic harvest technologies are being developed with the goal of being implementable in existing fields, with traditional row spacing and bed sizes, it is possible that planting practices will be altered in the future to better accommodate advances in robotic harvest systems. It is difficult to anticipate the impacts of such changes, and this study makes no attempt to incorporate these possibilities. Finally, there is often speculation that robotic harvest solutions may impact fruit quality, or require innovations in packaging and shipping practices. Again, this study does not consider these possibilities and estimates the profitability of robotic harvest assuming no impacts to quality or supply chains of fresh market strawberries.
As discussed above, there are no public data on the actual costs of purchasing or operating robotic harvest systems, or on the harvest efficiency and field speed parameters that are crucial for estimating economic feasibility. Moreover, although there are several teams working to bring robotic harvest to California strawberry producers, it is not clear what the market for automated harvest solutions will look like in the coming years. Given the lack of detailed information and in-field performance data, the challenge is to present an analysis that is specific and precise enough to be informative, but general and flexible enough to cover a large segment of the uncertain outcomes in the robotic harvest field. The parameters assumed for this analysis, and the alternative harvest methods and business models used in the robotic harvest scenarios, are based on individual interviews with executives at Harvest Croo Robotics (Plant City, Fla.) and Agrobot (Oxnard, Calif.) in early 2019. The analyses are not meant to reflect these technologies or companies specifically, but rather a range of outcomes that is most likely to occur when growers begin to adopt robotic harvest technology.
Single robotic pass vs. manual cleanup
Two robotic harvest use scenarios are considered: the first assumes a single pass with the robotic harvester, while the second assumes that a human crew will follow to pick fruit that the harvesting machine missed. The lower the harvest efficiency of the robotic harvester, the more fruit that would be left for the supplementary manual pick. There is some disagreement in the industry whether a secondary manual pick would be cost-effective, given that the piece rates offered to incentivize workers to harvest behind the robot might be exceedingly high. In the current system, piece rates tend to increase when fruit loads are low, and workers cannot fill a tray as quickly as during peak production periods (Hill 2019; Wu et al. 2017). Since it is not clear exactly how much would need to be paid on a per-tray basis to workers following a robotic harvester, this analysis includes results reflecting piece rates of 150% and 200% of the piece rate for traditional manual harvest.

Exterior view of an Advanced Farm Technologies robotic strawberry harvester. Advanced Farm is one of a handful of companies currently working with strawberry growers to test and refine robotic harvest technologies.
A key assumption must be made with respect to the harvest speed attained by a robotic harvester. The overall harvest speed depends on the number of robotic arms on the unit as well as the average harvest speed for each robotic arm. Additional arms added to the unit allow a higher overall field speed (i.e., acres per hour), but also increase the probability that an individual arm has to wait, unused, for the other arms to finish picking the proximal fruit. While the technical details are different for each development team, this analysis assumes 16 harvest arms and a range of harvest speeds, per arm, from one berry every 7 seconds to one berry every 19 seconds. Assuming 15 berries per 1-pound clamshell and eight clamshells per tray, this represents a range of 25 to 69 trays per hour.
Another key assumption relates to the percentage of berries that are successfully harvested by the robotic system, referred to here as the harvest efficiency. Several factors impact robotic harvest efficiency, including the thickness of vegetative growth of the plant, the design of the harvesting arm and the accuracy of the different vision system and fruit identification software technologies used by the firm in question. Harvest efficiencies will vary across the growing season as field conditions evolve and may by impacted by strawberry cultivar and other factors. This study considers harvest efficiencies from 40% to 90% of the human harvest volumes. That is, at the highest 90% level, the robotic harvest would successfully harvest 90% of the 7,000 trays per acre total production assumed in the 2016 cost and return study that is serving as our benchmark.
Assumptions of equipment cost
When considering the total cost of agricultural equipment, one must consider the machinery purchase price, interest rates, repair costs and operating costs. Total annual machinery costs are calculated by applying conservative purchase price and repair estimates to a commonly used machinery cost calculator (Edwards 2019). This analysis uses a purchase price of $500,000, with a 10-year useful life, operator and fruit packing cost of $50 per hour and an annual repair cost of $50,000. The interest rate is assumed to be 4.25%, which is consistent with Bolda et al. (2016). Under these assumptions, the cost of labor to operate the robotic harvester and pack harvested fruit would be between $0.73 and $1.98, depending on field speed (7 to 19 seconds per berry per arm). With other operating and ownership costs included, full robotic harvest costs range between $1.70 and $5.20 per tray, depending on the speed and efficiency (successful pick of 40% to 90% of ripe berries) of the harvester.
As with any costly equipment purchase, the annual hours of use has a significant impact on the per-unit cost of ownership. As such, it will be critical for those operating these machines to fully utilize the equipment, so that the ownership costs are spread out over as many trays as possible. Interviews with robotic harvest developers indicate that, given the seasonal fluctuation in fruit load on strawberry plants, more acres will be covered by robotic harvesters in the early and late parts of the season than in the peak production months. In order for the robotic harvester to be fully utilized, the scenarios assume a 50-acre field, with human harvest crews brought on in peak months when the robot will not be able to cover all 50 acres. With this model, the percentage of total fruit volume that is harvested robotically on this 50-acre field fluctuates from 10% in the most pessimistic speed and efficiency assumptions to 50% with the most optimistic assumptions. While the ownership costs per unit harvested could potentially be reduced with transport of the robotic harvester from region to region, or in some regions by scheduling both fall and summer planting to smooth out seasonal fluctuations, this study assumes the April to October harvest season and monthly production volumes presented by Bolda et al. (2016) for the Salinas-Watsonville region (an Excel-based version of all calculations is available from the author on request).
Manual harvest more profitable than robotic
The two robotic harvest scenarios are compared to the baseline case of a typical manual harvest scenario as represented by Bolda et al. (2016). While the cost of production, and the cost of harvest labor in particular, motivates the development of robotic harvest systems, the focus of this analysis is on the pre-tax net income per acre of strawberries grown. This allows for the consideration of reductions in revenue in the first robotic harvest scenario, which is driven by the lower harvest efficiencies expected with the robotic systems.

A manual harvest crew picking strawberries for fresh market sale. While it is difficult to match the speed and accuracy of human harvesters, rising labor costs make robotic alternatives increasingly attractive.
Table 1 shows the net income per acre of a manual harvest system at different wage rates. Table 2 shows the net income per acre for robotic harvest at manual harvest piece rates ranging from $1.70 to $2.70 per tray, and robotic harvest efficiencies from 40% to 90% of the human harvest volumes. All other parameters and assumptions are constant across these scenarios and discussed in the previous section. The outcomes in table 2 reflect a single pass of the robotic harvester, with no manual follow-up pick. However, net income decreases as harvest piece rates rise because human workers are employed in all robotic harvest scenarios during times of peak production. These workers do not follow the harvesting robot, but rather operate as typical human harvest crew on acreage that the robotic harvester cannot get to when fruit loads are high.
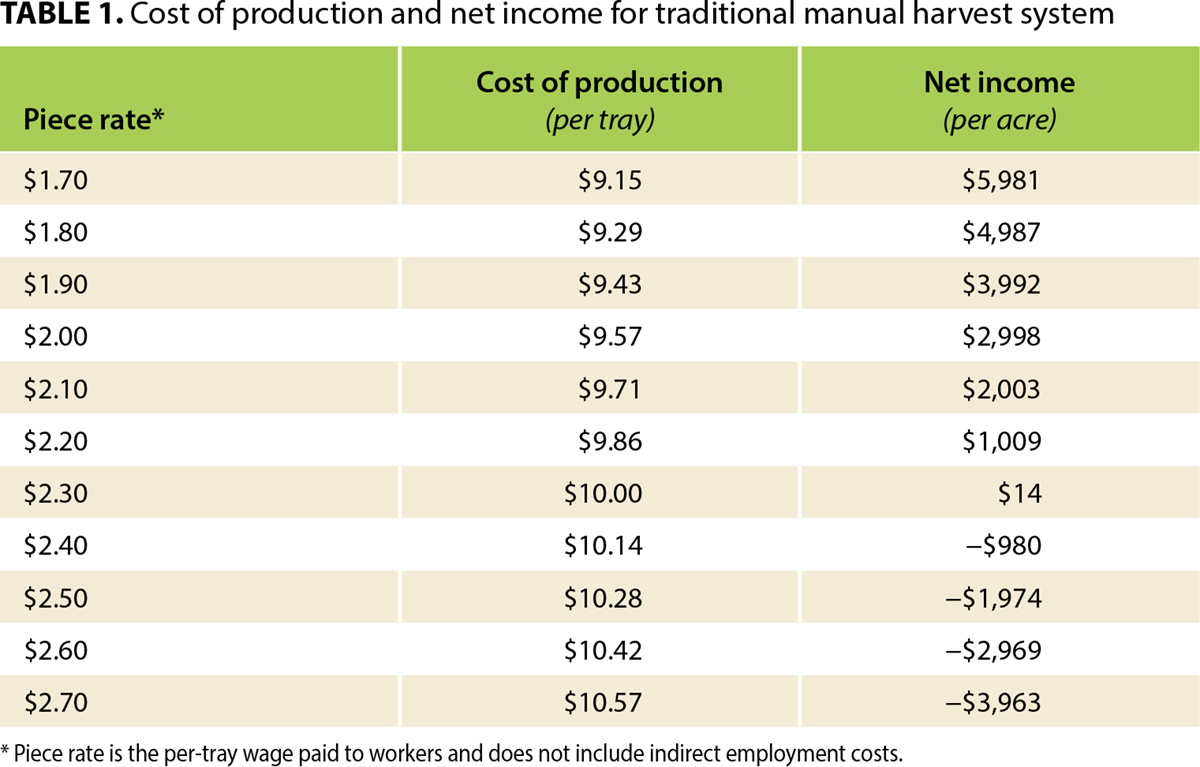
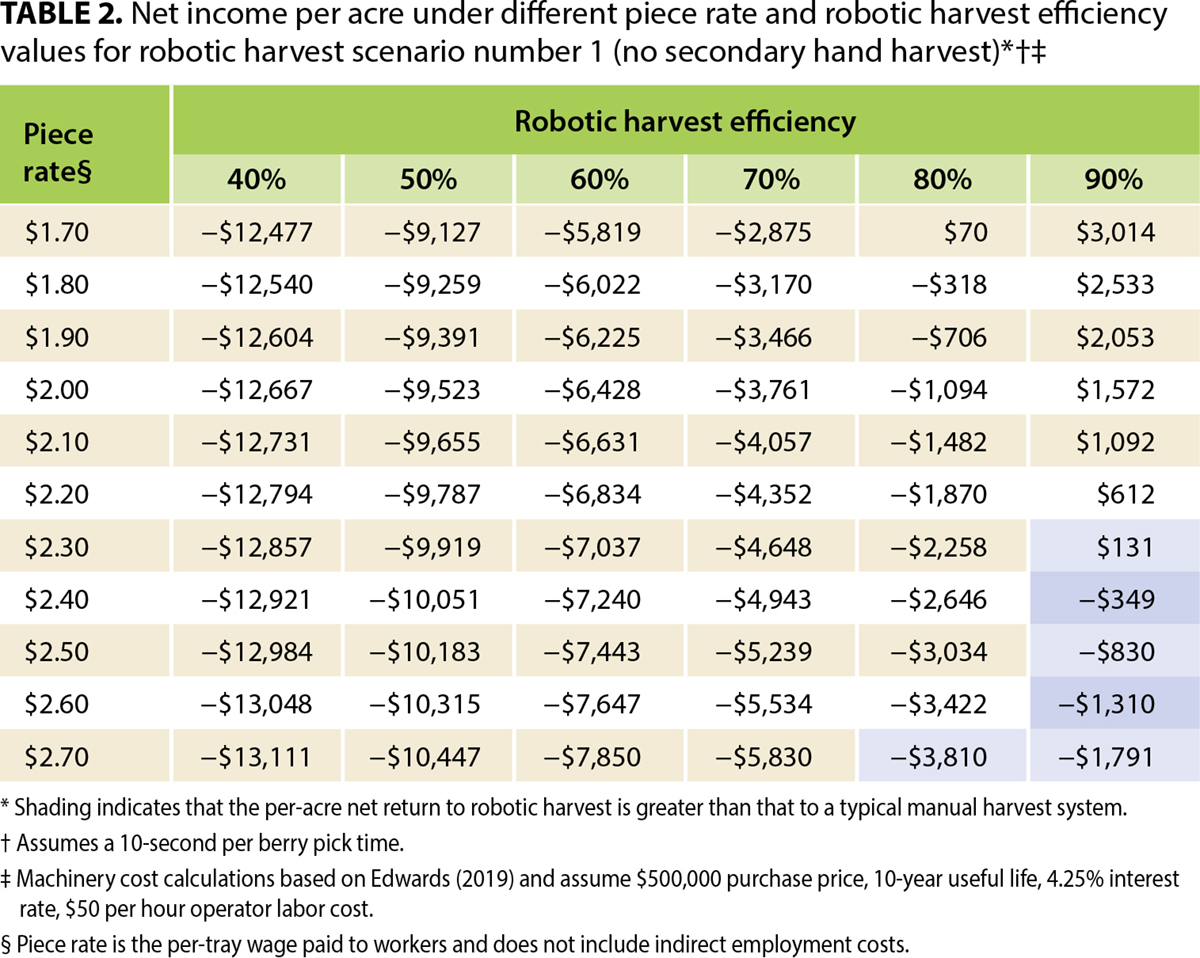
TABLE 2. Net income per acre under different piece rate and robotic harvest efficiency values for robotic harvest scenario number 1 (no secondary hand harvest)∗†‡
The shaded values in table 2 are those piece rate and efficiency combinations for which the robotic harvest results in a higher net income than the status quo manual harvest system. The robotic harvest system, without human workers carrying out a second harvest pass, only outperforms manual harvesters at robotic harvest efficiency rates at 80% or above, and at manual harvest piece rates higher than those currently faced by growers. It is also worth noting that, while higher wage rates make robotic harvest more attractive, they also reduce the overall profitability of strawberry production if prices remain constant as assumed in this study. The degree to which strawberry prices will evolve over time is unknown, and depends on California planted acreage and yields, and production levels in other strawberry growing regions.
Table 3 shows the per-acre net income assuming a $1.90 per tray piece rate, but with varying robotic harvest field speeds and harvest efficiencies. The speed of harvest per berry for each robotic arm is varied from 7 to 19 seconds and harvest efficiency is again varied from 40% to 90% of human harvest crews. The only combination of these parameters that results in robotic harvest outperforming manual crews is the highest speed and highest efficiency considered. If the assumed wage for manual workers was increased, robotic harvest would be relatively more attractive, but this result shows that significant technological advances are likely necessary before robotic harvest can outperform manual workers on the basis of net return per acre.
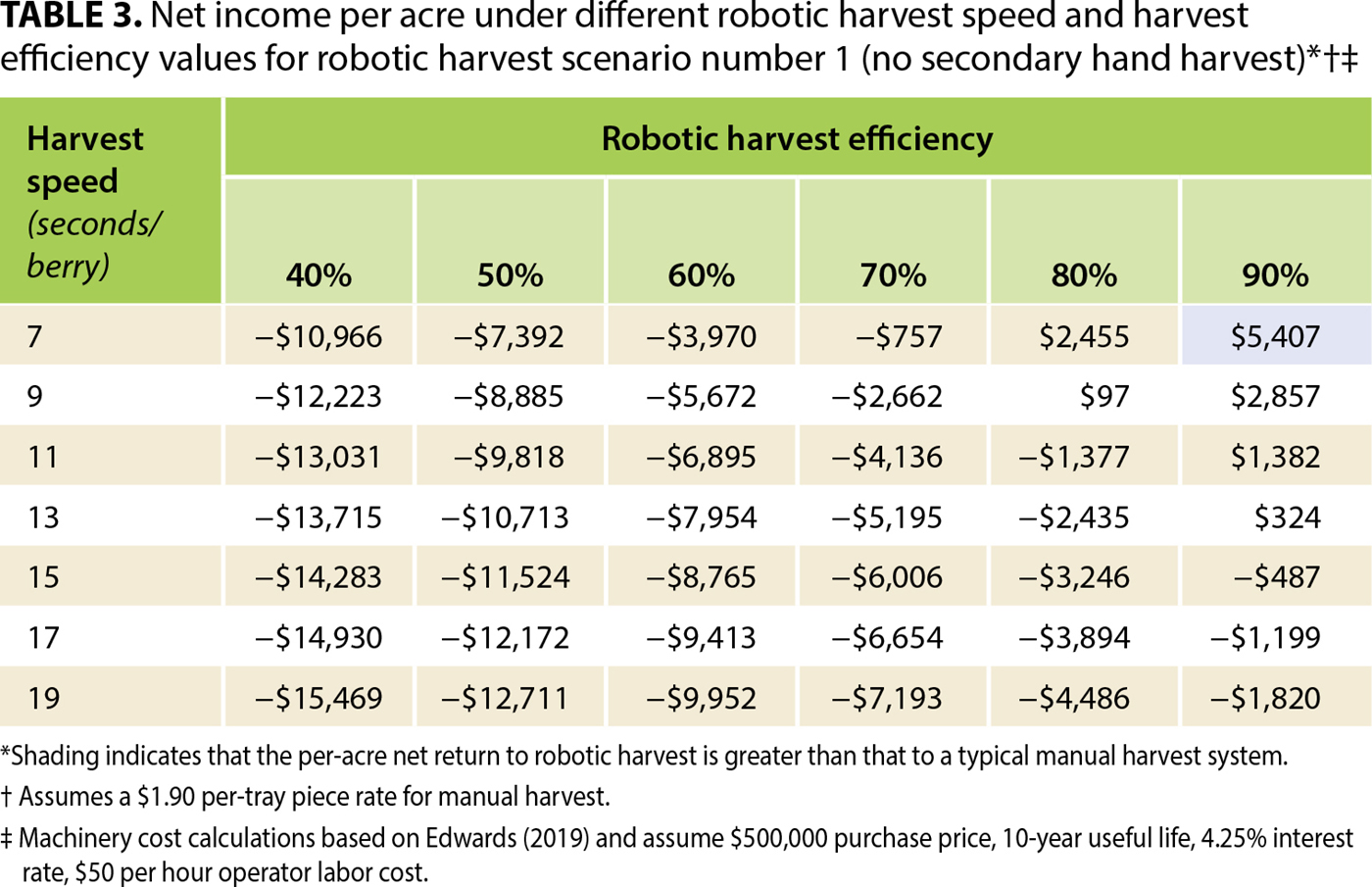
TABLE 3. Net income per acre under different robotic harvest speed and harvest efficiency values for robotic harvest scenario number 1 (no secondary hand harvest)∗†‡
Table 4 shows the per-acre net income assuming a 70% harvest efficiency, which is in line with optimistic estimates of the state of leading robotic harvest technology in 2019, and varies harvest piece rate and the robotic harvest speed. Again, only the fastest harvest speeds and highest wage rates result in net incomes that are higher than those estimated for manual harvest systems at the same wage rates. This shows that unless the robotic harvest efficiency can surpass 70% of the human workers' performance, wages will need to increase by 50% before robotic systems will be viable.
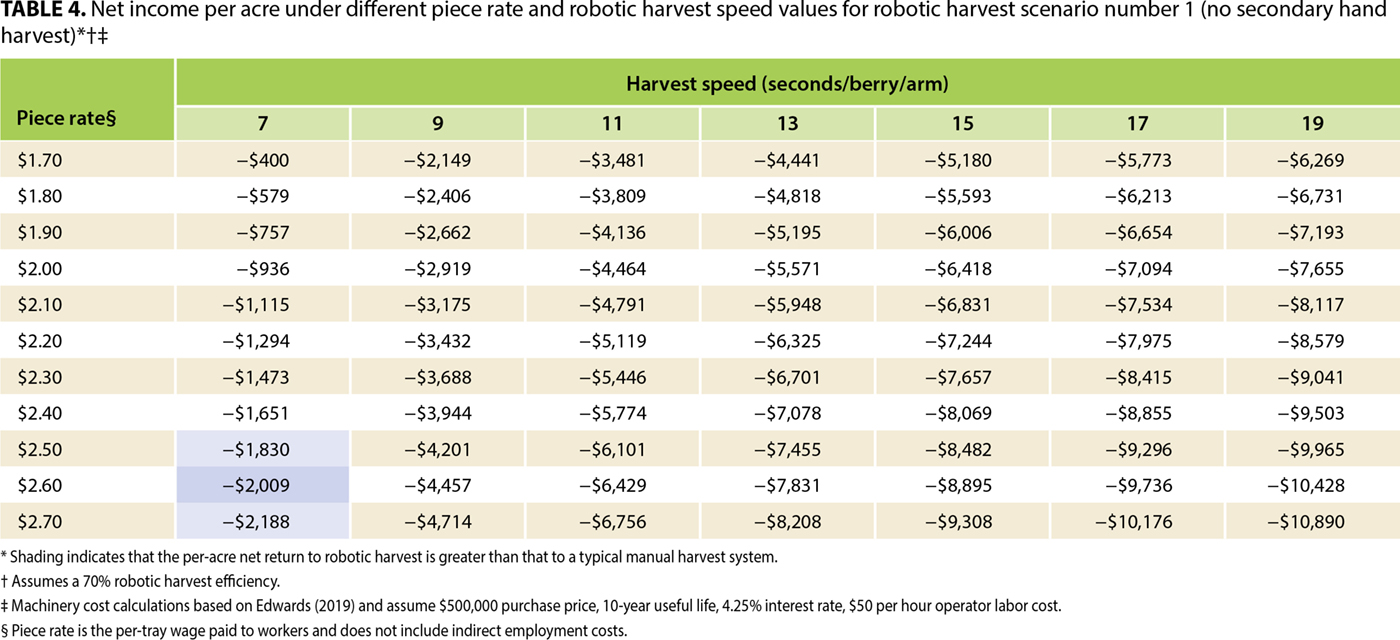
TABLE 4. Net income per acre under different piece rate and robotic harvest speed values for robotic harvest scenario number 1 (no secondary hand harvest)∗†‡
A second robotic harvest scenario is considered in which the robotic pick is followed by a supplementary manual pick to collect fruit that the robotic harvest arm missed. Table 5 shows the net income per acre under this scenario when piece rate and harvest efficiency are varied. The table 5 results reflect an assumption that the workers in the follow-up harvest receive a piece rate equal to 150% of the market rate. This table should be compared to table 2, which shows the same parameter assumptions without the follow-up harvest. The supplementary harvest is attractive at lower wage rates and the full range of harvest efficiencies. Perhaps surprisingly, the follow-up harvest results in higher net income than the scenario with only the single robotic pass in most wage rate and efficiency combinations.

TABLE 5. Net income per acre for robotic harvest scenario number 2 (includes secondary pass of manual workers; piece rate for secondary pick assumed 150% of market rate)∗†‡
Since it is not known what wage rate would have to be offered to workers for a secondary manual harvest, table 6 presents net incomes per acre for this scenario with an assumed piece rate for supplementary harvest that is double the market piece rate for a traditional harvest crew. As expected, this assumption reduces the range of wages and robotic harvest efficiencies for which a supplementary pick is more profitable, but there are no combinations in this table that indicate a net income that is higher than a single robotic harvest pass as well as the status quo manual harvest system.

TABLE 6. Net income per acre for robotic harvest scenario number 2 (includes secondary pass of manual workers; piece rate for secondary pick assumed 200% of market rate)∗†‡
Challenges and implications for the industry
The results show that at current market wage rates and harvest efficiencies presently attainable by leading robotic harvest technologies, manual harvest is more profitable than robotic harvest. Of course, this is not surprising, as there are not yet robotic harvest systems in widespread commercial operation in the United States. The results also show that if the robotic harvest systems can achieve efficiency rates above 70% or 80% of human harvest efficiency, and wage rates increase as expected over the next couple of years, the industry will see adoption of robotic harvesters become economically feasible for large strawberry growers, or as a custom harvest service.
This analysis relies heavily on assumptions of robotic harvest technical parameters, but also on machinery ownership and operating costs. Furthermore, there are several aspects of a strawberry production system that would be impacted by the adoption of a robotic harvest system that are not considered here. First, this analysis makes no mention of potential differences in fruit quality or marketability of robotically harvested fruit. There may be challenges associated with packaging fruit that have not been considered, and that will add cost to the robotic system. It's also possible that growers/shippers may be able to develop novel packaging solutions that will allow for more efficient distribution and sales under a robotic system. Given that there remains a role for human workers in all of the robotic harvest scenarios considered here, it appears that supply chains that can easily and efficiently accommodate both human and robotic harvesters will be necessary.
A second source of uncertainty relates to field cleanliness and plant health. Under the first robotic harvest scenario considered, no manual harvest is expected to follow the robotic harvest. The reasoning behind this assumption is that the high cost of a supplementary harvest will more than offset the additional revenue from the secondary pick and that yield lost to potential disease pressure caused by rotting fruit on the plant bed will be minimal. Future research will need to be carried out on the degree to which lower harvest efficiencies cause problems for overall plant health and reduce strawberry yields over the course of the season.
It is also unclear how the adoption of robotic harvest systems by some growers may impact the labor market for manual harvest crews on which the rest of the strawberry industry will continue to exclusively rely. If large producers are able to invest in robotic harvest systems first, thus reducing their demand for human workers, the growers that do not invest in robotic systems might see an easing of the labor challenges that they currently face. This would ultimately reduce the incentive for these growers to pursue automation and may lessen the rate of adoption. This analysis does not include modeling or estimates of the dynamics of adoption across the industry, other than speculate that larger growers are likely to be those that are incorporate the technology first.
Finally, a significant potential benefit of robotic harvest systems that is not considered in this analysis relates to the value of data that would be generated by near continuous plant-level monitoring with computer vision systems. High-resolution data on plant vigor, disease and insect pests could be gathered and applied in ways that are difficult to foresee today. It is beyond the scope of this work to estimate the benefit that this technology may ultimately yield, but highresolution data has shown strong potential to profitably refine the management of other crops (Bauer et al. 2019; Trilles et al. 2018), and strawberry growers may be able to do the same.
Despite the technical challenges associated with the selective robotic harvest of sensitive ripe strawberries, industry leaders are optimistic that manual strawberry workers will eventually be supplemented by robotic harvest systems in some form. This analysis shows that while the field speeds and robotic harvest efficiencies are not yet to the point where these systems are competitive with human workers, a speed target of 10 seconds per berry and 70% to 80% harvest efficiency are not unreasonable goals and could make adoption of robotic harvest financially attractive in some form. Further, even with the commercial adoption of robotic harvest technology, this analysis shows that significant human labor will still be critical for fresh-market strawberry harvest in the United States.
Robotic strawberry harvest is promising but will need improved technology and higher wages to be economically viable

